
Analyse und prototypische Implementierung echtzeitfähiger Schattenverfahren mit Deferred Shading für den Einsatz in Tests von kamerabasierten ADAS
Bachelorarbeit von Till Pankoke
Betreuung: dSPACE und Sabrina Heppner M.Sc.

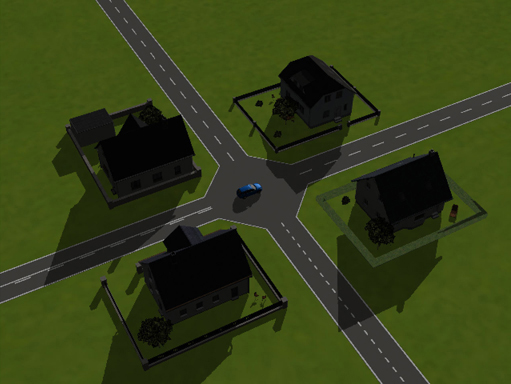
Fahrerassistenzsystemen (engl. Advanced Driver Assistance Systems - ADAS) unterstützen den Fahrer bei der Wahrnehmung der Fahrzeugumgebung und erhöhen so die Sicherheit im Straßenverkehr. Einige Fahrerassistenzsysteme - wie zum Beispiel Fahrspurassistenten, Verkehrszeichenassistenten und Fußgängererkennungssysteme - verwenden unter anderem Kamerasensoren, um die Fahrzeugumgebung zu analysieren. Diese Assistenzsysteme können mit Hardware-in-the-Loop Simulatoren (HIL-Simulatoren) bereits in einem frühen Entwicklungsstadium zuverlässig getestet werden. Dazu ermöglichen die Simulatoren virtuelle Testfahrten, indem alle Ein- und Ausgänge der zu testenden Komponente mit dem Simulator verbunden werden. Während einer virtuellen Testfahrt berechnet der Simulator die Eingangssignale für die Komponente und reagiert auf die daraus resultierenden Steuersignale. Für den Test kamerabasierter Fahrerassistenzsysteme folgt daraus, dass HIL-Simulatoren in der Lage sein müssen realitätsgetreue Bilder der Fahrzeugumgebung zu erzeugen. Abbildung 1 und 2 zeigen anhand einer Beispielszene, dass Schatten an mehreren Stellen im Straßenverkehr auftreten. Insbesondere ist zu sehen, dass die Umrisse der Schatten den Umrissen der schattenwerfenden Objekte entsprechen. Daraus folgt, dass HIL-Simulatoren für den Test kamerabasierter Fahrerassistenzsysteme korrekten Schattenwurf berechnen müssen. Im Rahmen dieser Arbeit soll ein Algorithmus gefunden werden, mit dem diese Aufgabe erfüllt werden kann. Dazu wird zunächst in einem Anforderungskatalog definiert, welche Bedingungen ein Schattenalgorithmus erfüllen muss, damit dieser Algorithmus im Test kamerabasierter Fahrerassistenzsysteme eingesetzt werden kann. Auf Grundlage dieser Anforderungen werden mehrere infrage kommende Algorithmen vorgestellt und bewertet. Der Algorithmus, der die Anforderungen am besten erfüllt, wird prototypisch implementiert. Anschließend wird der Prototyp auf Basis der gestellten Anforderungen bewertet.
This Bachelor Thesis was accepted into 6th Annual Faculty Submitted Sutend Work Exhibit at SIGGRAPH 2017. The submitted video can be seen here.